Chess provides real cognitive benefits, especially for elderly users who benefit from strategy and mental stimulation. But it requires a human opponent, and for many older adults, that's not always possible. Digital chess exists, but loses the physical appeal of a real board.
Autonomous Chess Piece.
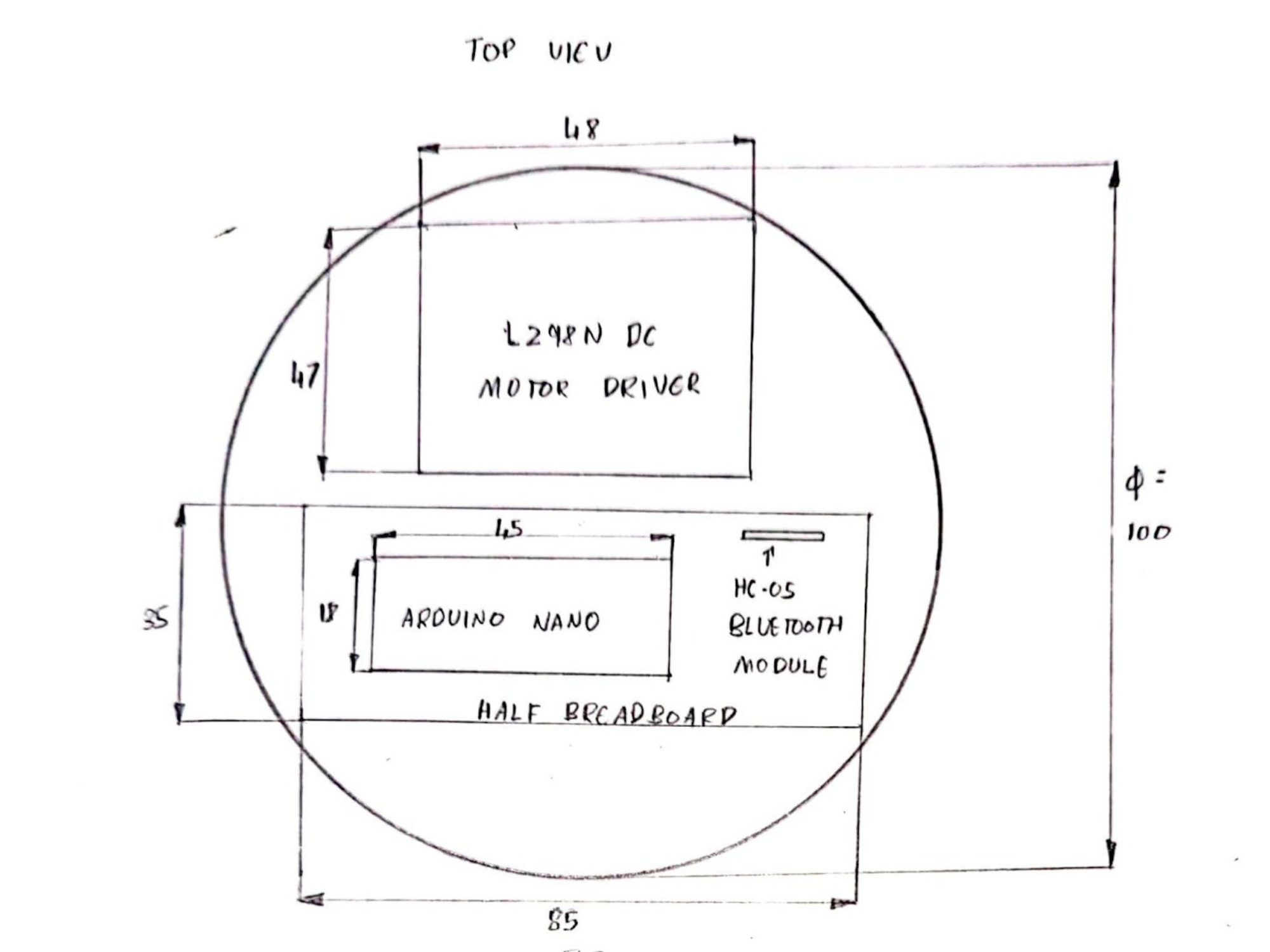
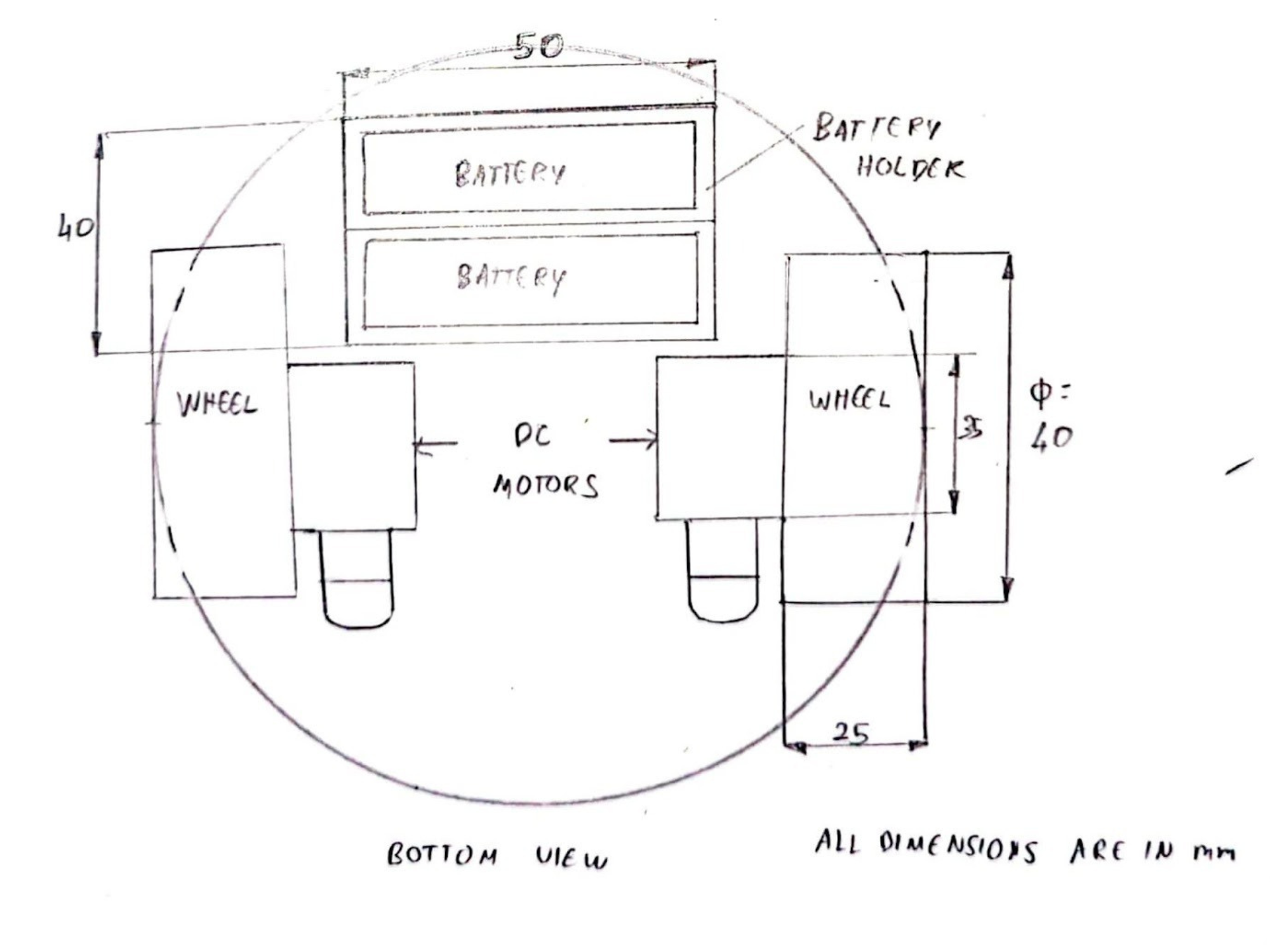
A self-navigating chess piece with onboard drive, Bluetooth, and AI move generation, designed to give elderly users a physical opponent that never needs to leave the house.
Team
Krishnaa Sudhir
Gauri Jayakrishnan Nair
Kiruthika Vajjiravelu
Madhumitha Chandrasekaran